We are attempting to mimic the form and function of four types of mechanoreceptors, pain receptors, and temperature receptors found in human skin, while designing and preparing flexible sensors for robotic tactile perception. Our expertise in tactile sensor types includes but is not limited to: piezoresistive, iontronic, and piezoionic sensors.
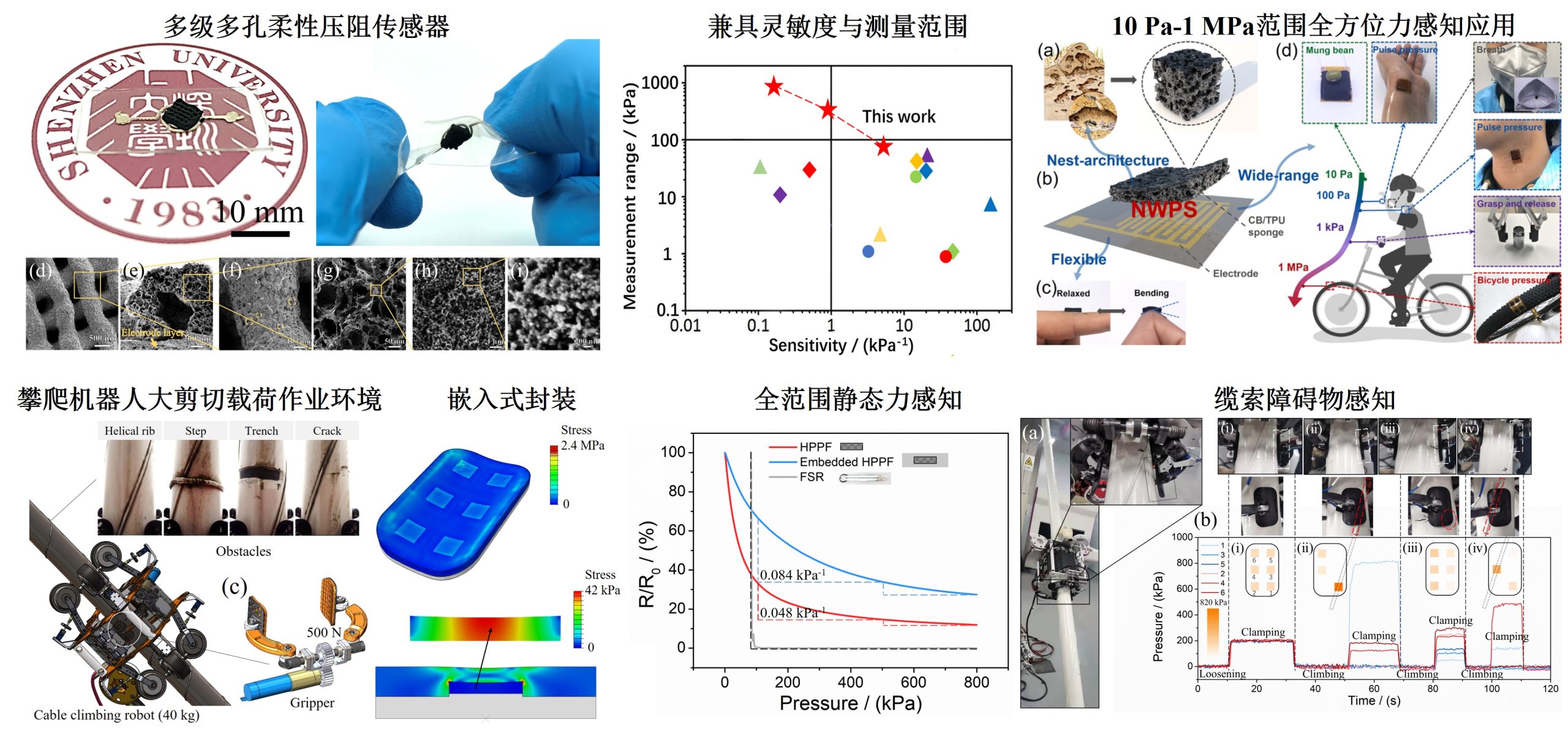
For example, our early-developed porous piezoresistive materials can achieve effective force perception across the entire range of 10 Pa to 1 MPa (with a sensitivity of 5 kPa-1), whereas human skin perception ranges only from 100 Pa to 100 kPa. Based on a simple assembly process, we can achieve a SA-I tactile skin array with 100 Taxel/1 cm2 and facilitate large-scale mass production.
High-resolution 10×10 pressure-sensitive array.
Large-scale 10×10 pressure-sensitive array fabricated from mass-producible flexible porous piezoresistive materials.
Single-point flexible 3D force sensor.
Tactile applications of flexible 3D force sensors.
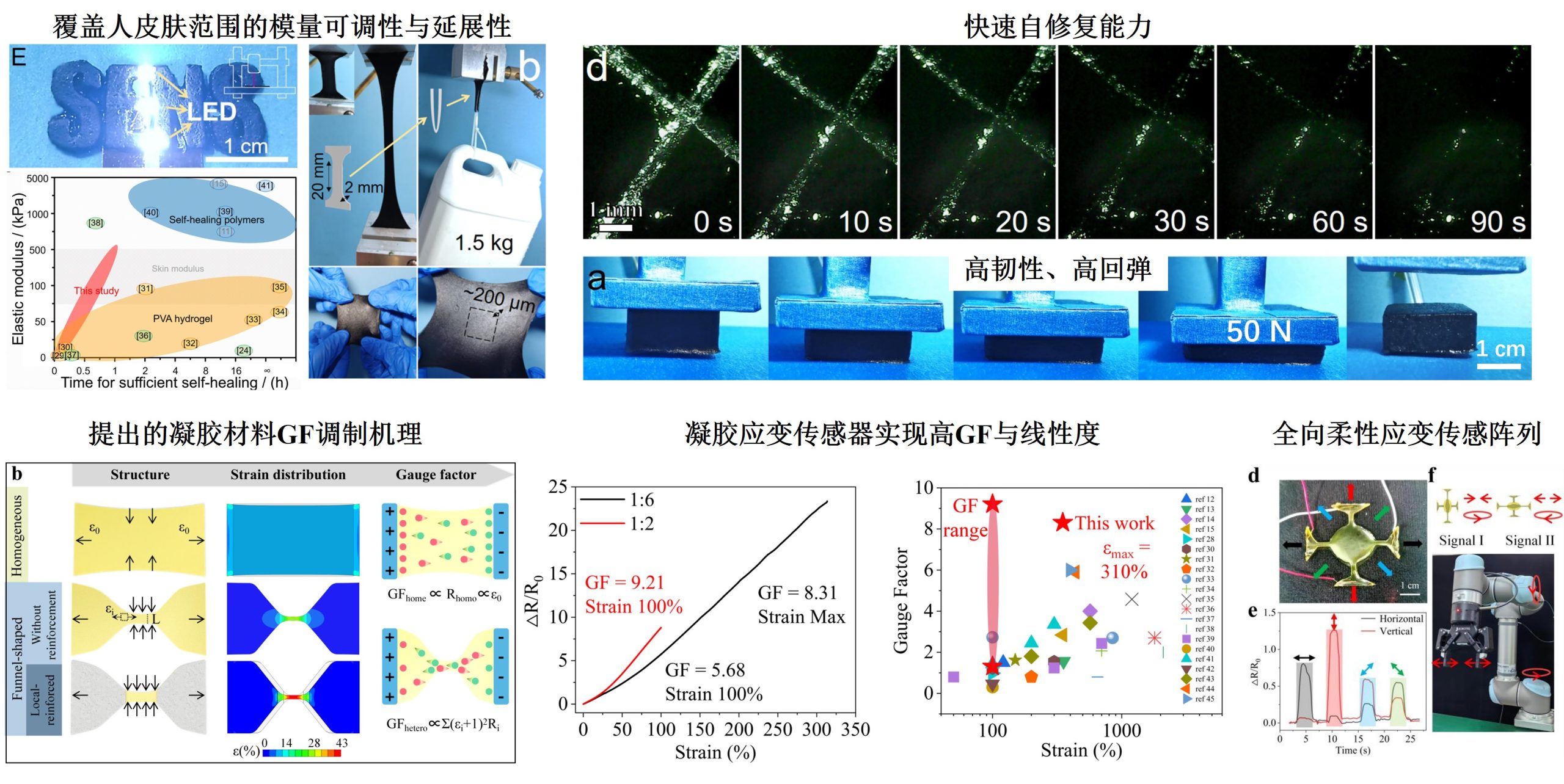
To mimic the ion channel sensing mechanism of human skin, we developed a highly resilient, self-healing ionogel material. Utilizing a funnel-shaped structure, we effectively enhanced the Gauge Factor of SA-II tactile sensors, enabling precise perception of contact deformation.
We aim to integrate different types of biomimetic mechanoreceptors along with their hardware acquisition modules into universal humanoid robot dexterous fingertips, exploring their robustness and energy consumption issues, to realize the practical application of robot tactile sensing.