我们尝试去模仿人类皮肤的四类机械感受器、疼痛感受器、温度感受器等的形态与功能,设计并制备用于机器人触觉感知的柔性传感器。我们擅长的触觉传感器件类型包括但不限于:压阻(Piezoresistive)、离电(Iontronic)、压离电(Piezoionic)。
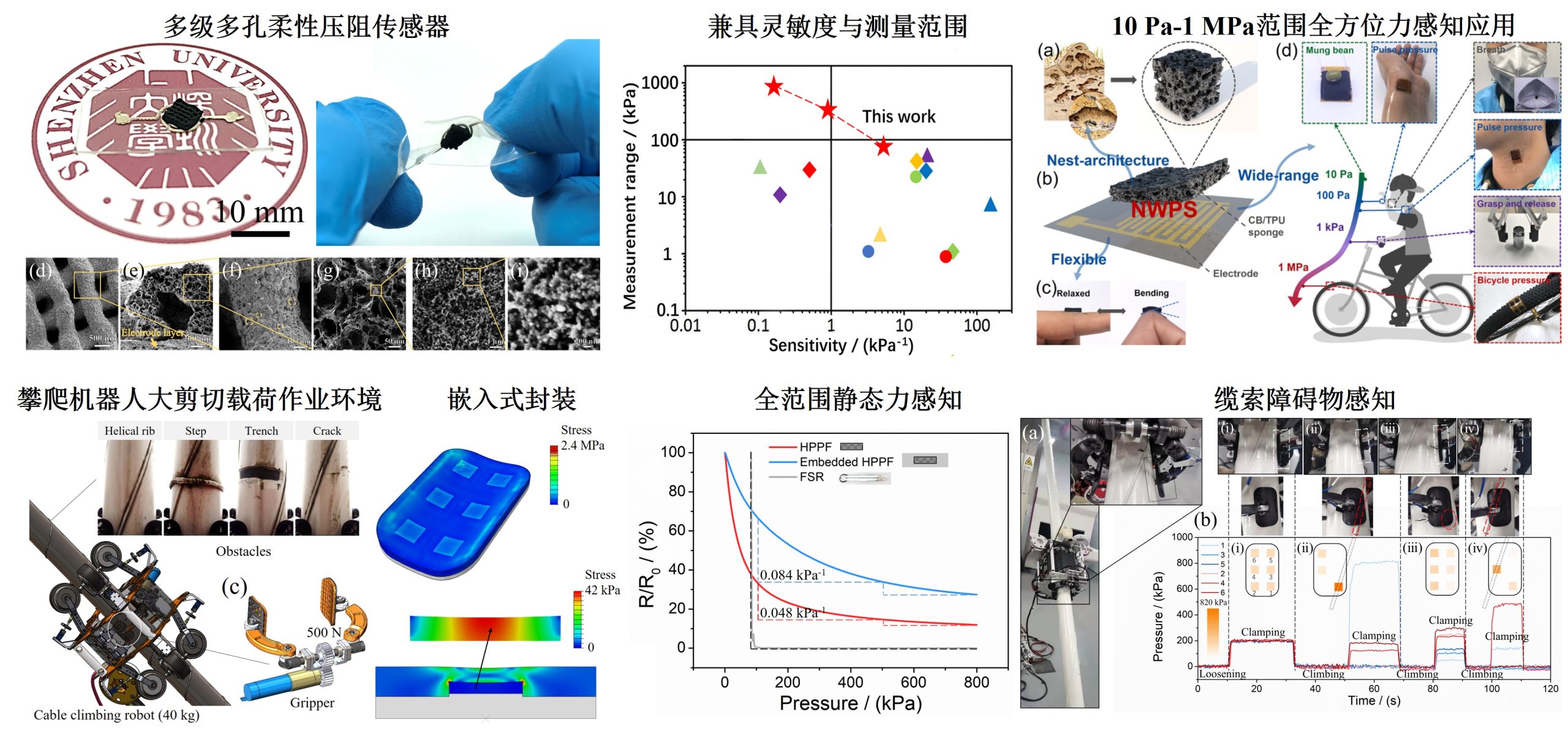
例如,我们早期研发的多孔压阻材料,能够实现10 Pa~1 MPa全范围有效力感知(灵敏度5 kPa-1),而人皮肤感知范围仅为100 Pa~100 kPa。基于简单的组装工艺,能够实现100 Taxel/1 cm2的SA-Ⅰ触觉皮肤阵列,以及大面积的量产制备。
高分辨10*10压阻阵列
基于可量产的柔性多孔压阻材料制备的大面积10*10压阻阵列
单点柔性三维力传感器
柔性三维力传感器的触觉应用
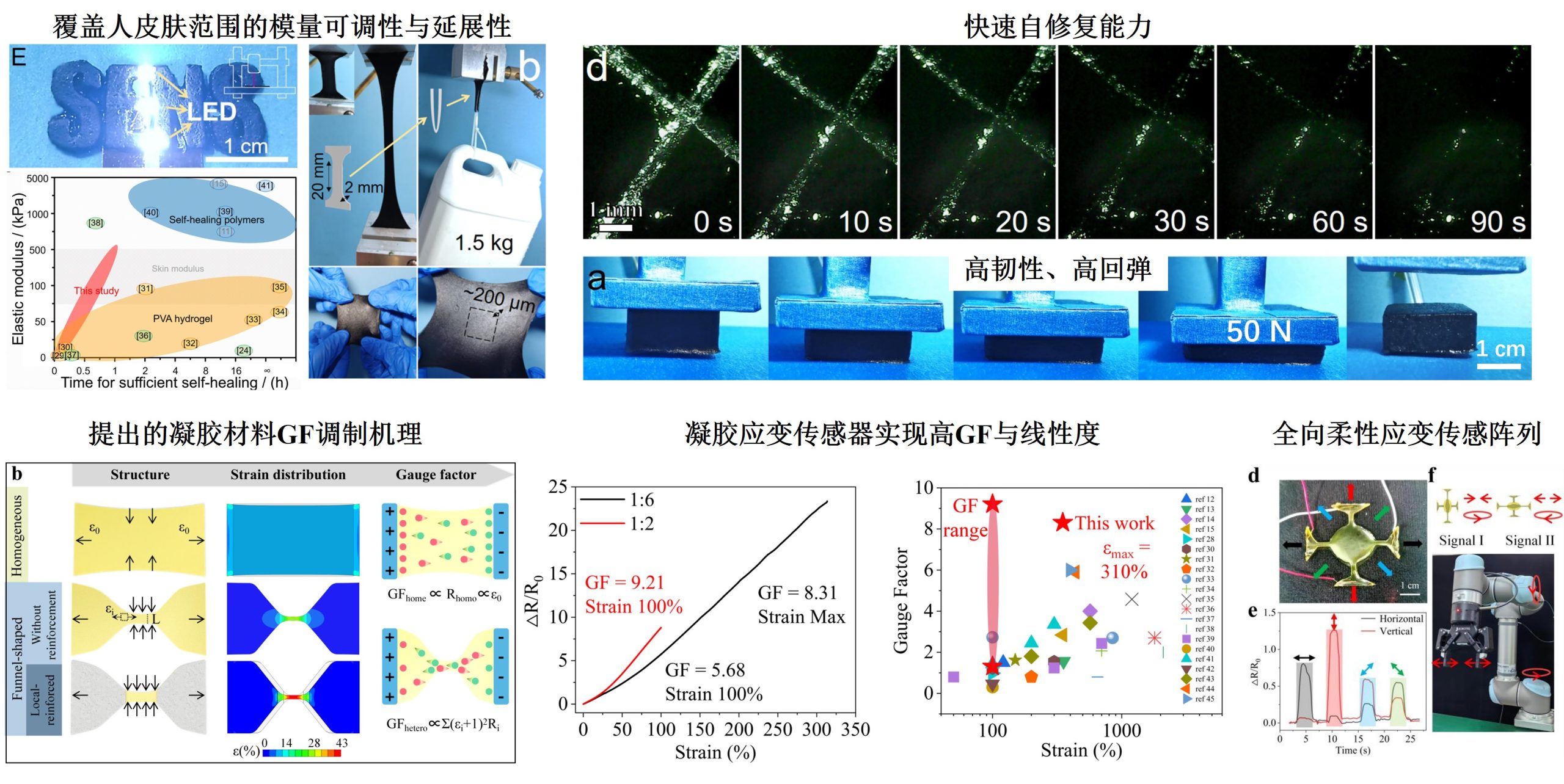
为模仿人皮肤离子通道感知机理,我们开发了高回弹自修复的离子凝胶材料,通过漏斗形结构有效提高SA-Ⅱ触觉感知器件的应变系数(GF),实现对接触形变的有效感知。
我们将不同类型仿生触觉感受器及其硬件采集模块与通用人形机器人灵巧手指做一体化集成,探究其鲁棒性与能耗问题,实现机器人触觉应用落地。