基于现实世界的交互实验不仅复杂而且耗时,传感器状态、实验条件等因素的改变容易影响模型的准确性。我们通过开发触觉模拟器,帮助我们完成传感器的原型设计、特征描述、映射关系的训练等方面内容。不同于视触觉模拟器,Taxel触觉模拟器的开发会更具挑战。
在触觉信息的加持下,通过控制算法,我们希望机器人灵巧手能够具备丰富的抓取策略、能够使用工具、能够完成复杂的非结构化场景下的任务。
例如,我们通过不同的手势指导机器人完成对不同物品的抓取策略。
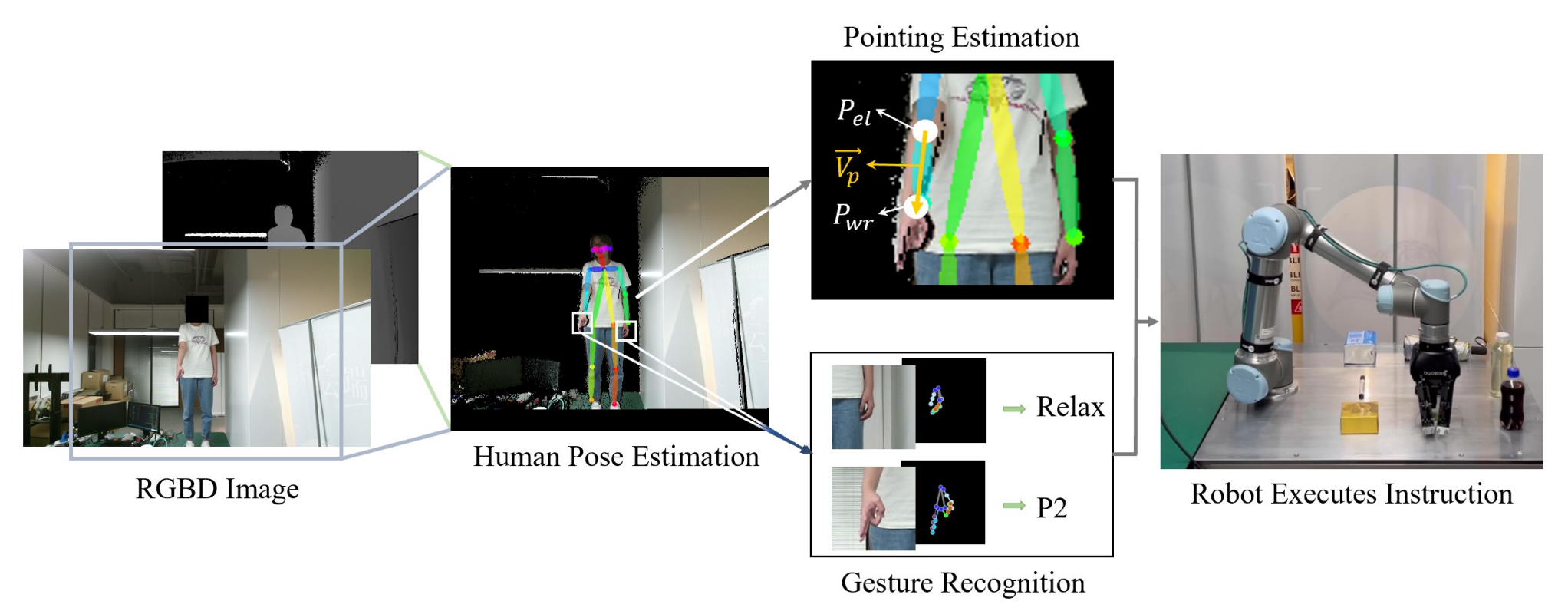
手势与指向引导的机器人对不同物体的抓取策略
我们通过设计有效的机器人具身动作(摇)实现机器视觉无法判断的信息,例如杯子里的水含量。
2024 IEEE Humanoids, 1034-1039
基于瓶中水的撞击瓶壁振动信号判断水的多少